Sul Physical Computingでは、マイコンやセンサの基礎技術を習得するために1/20サイズ模型の中を走行する探査機(Model Probe)を作成してきました。
これまで動作や操作機構などの解説を行ってきました。今回は、カメラとコントローラ制御について簡単に紹介します。
<keyword>
Edison, mjpg-streamer,Unity, Android 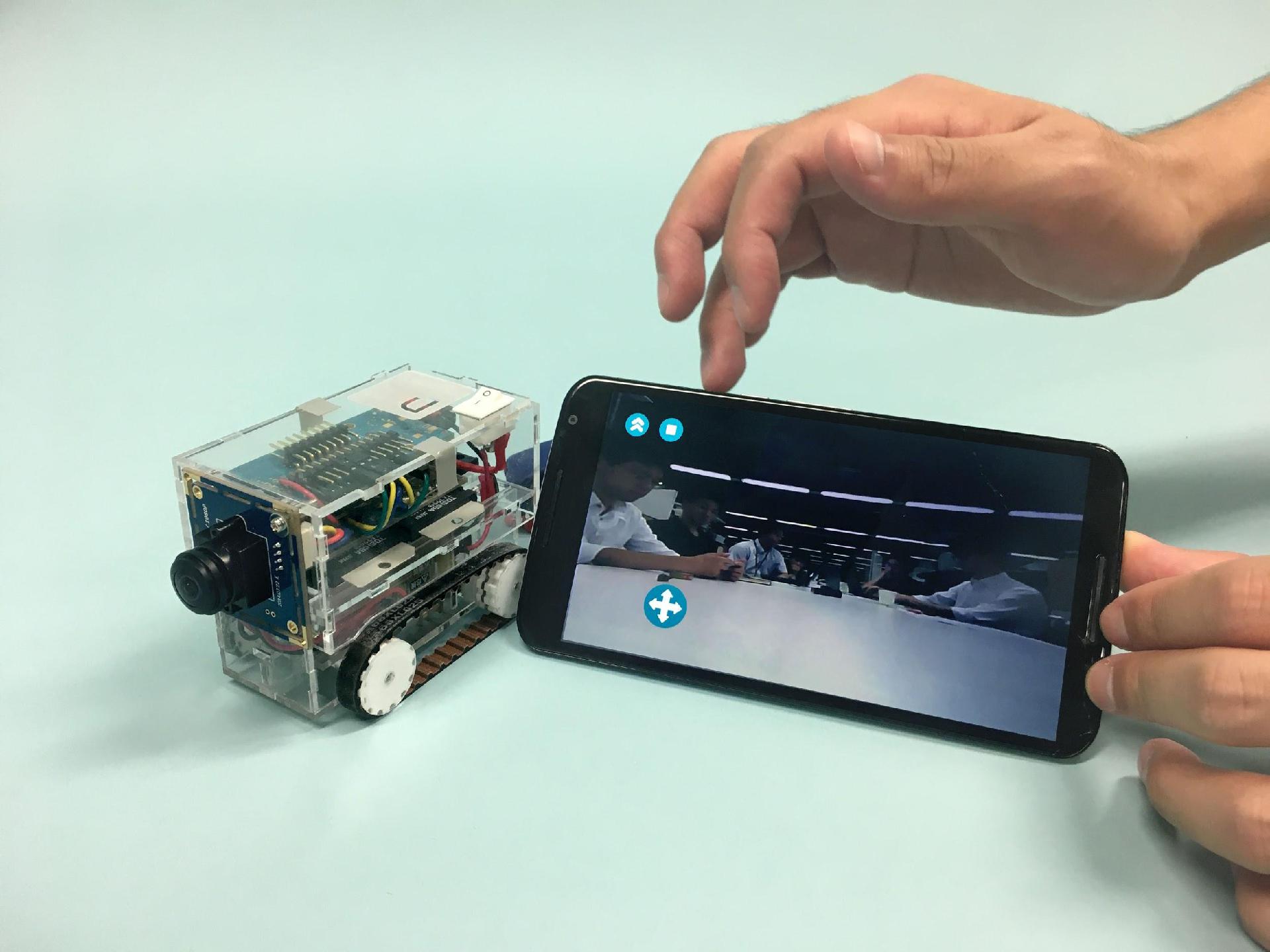
ゲームエンジンのUnityを用いて、コントローラとViewer機能をまとめたスマートフォンアプリケーションを作成しました。
以下に簡単な構成を示します。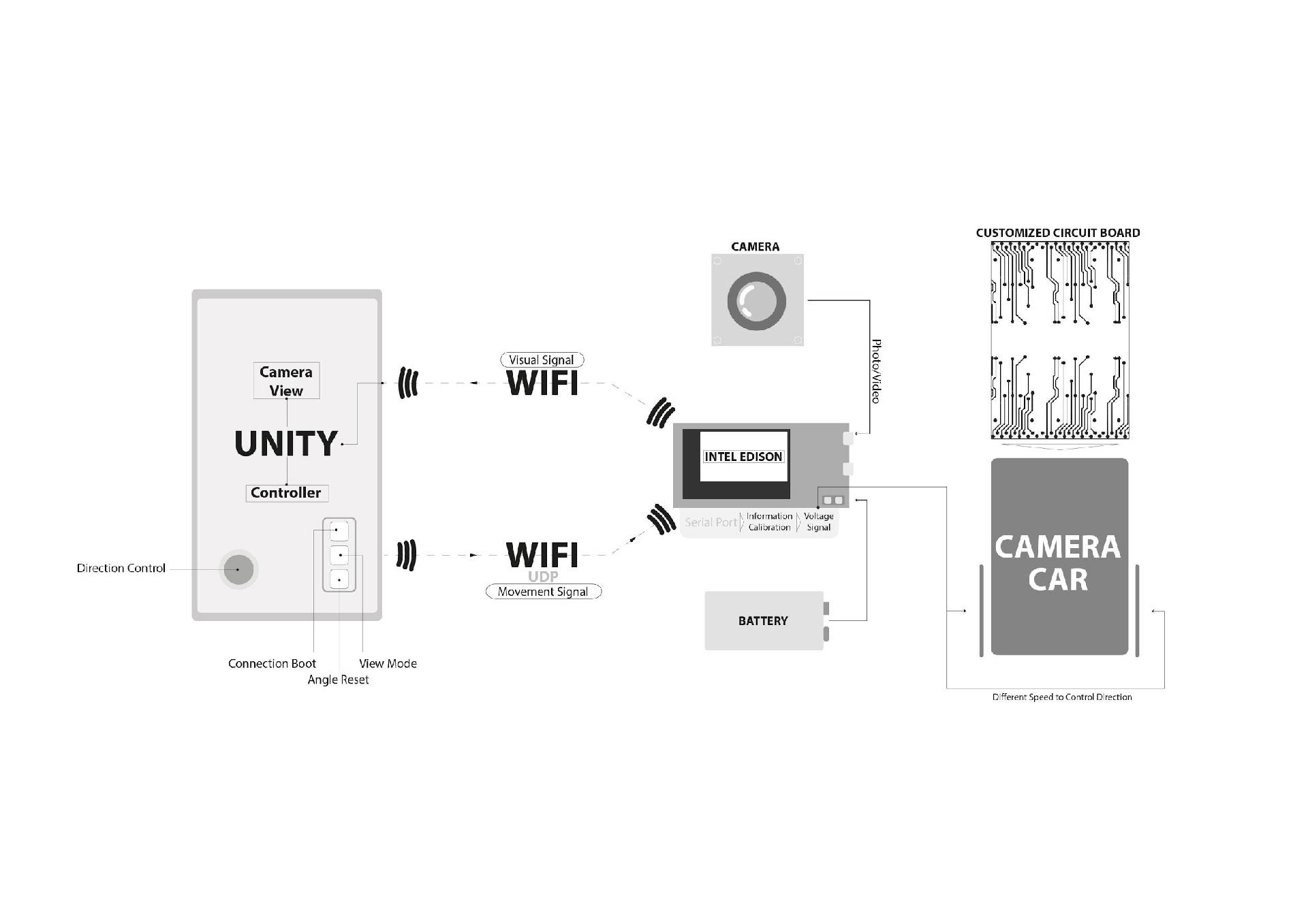
模型を走行する探査機はサイズの制約が大きな障害となります。
乗せているカメラ自体を動かすと、可動部が大きくなり模型にあたってしまったり、走行の邪魔となってしまいます。
そこで今回は180°半球レンズを採用して周囲を見回すことができる仕様としました。
昨今流行りの360°全天球カメラでは、上記のようなサイズの問題があることや、操作中の視点と実機の方向が分かりにくくなるため、前方がわかる視界のものを採用しました。
カメラからでライブストリーミングされた映像を、半球面に投影することで簡易的に歪みを補正し、アプリケーションの中で周囲を見回すことができます。 

動画のストリーミングにはmjpg-streamerというライブラリを使用しています。
スマートフォンをヘッドセットに差し込んで、外部のコントローラで操作すれば、VRのように模型の中を探索することができます。
このようにIoTの基礎技術の習得として模型探査機を作成しました。
今回は使用したマイコンのEdisonは、最近生産中止が発表されてしまいました。残念です。
今後Physical Computing Teamは引き続き実世界にシミュレーション結果をフィードバックしインタラクティブに変化動作する装置の開発や、IoT技術の利用、習得に努めていきます。

コメントをするにはログインしてください。