日建設計DDL室では、将来設計行為に役立つ可能性のある技術やツールを習得する勉強会("Skill Up Lab")を数名ごとのチームを組んで取り組んでいます。私たちのグループは"Physical Computing Lab"といい、マイクロコントローラーを用いた新たな設計手法の勉強会を開いています。
今後数ヶ月に渡り、私たちは技術の習得を目的に、建築模型の中を自走してカメラで撮影した映像をモニター等に映すVehicleを作ることにしました。Vehicleの与件は下記のものを想定しました。
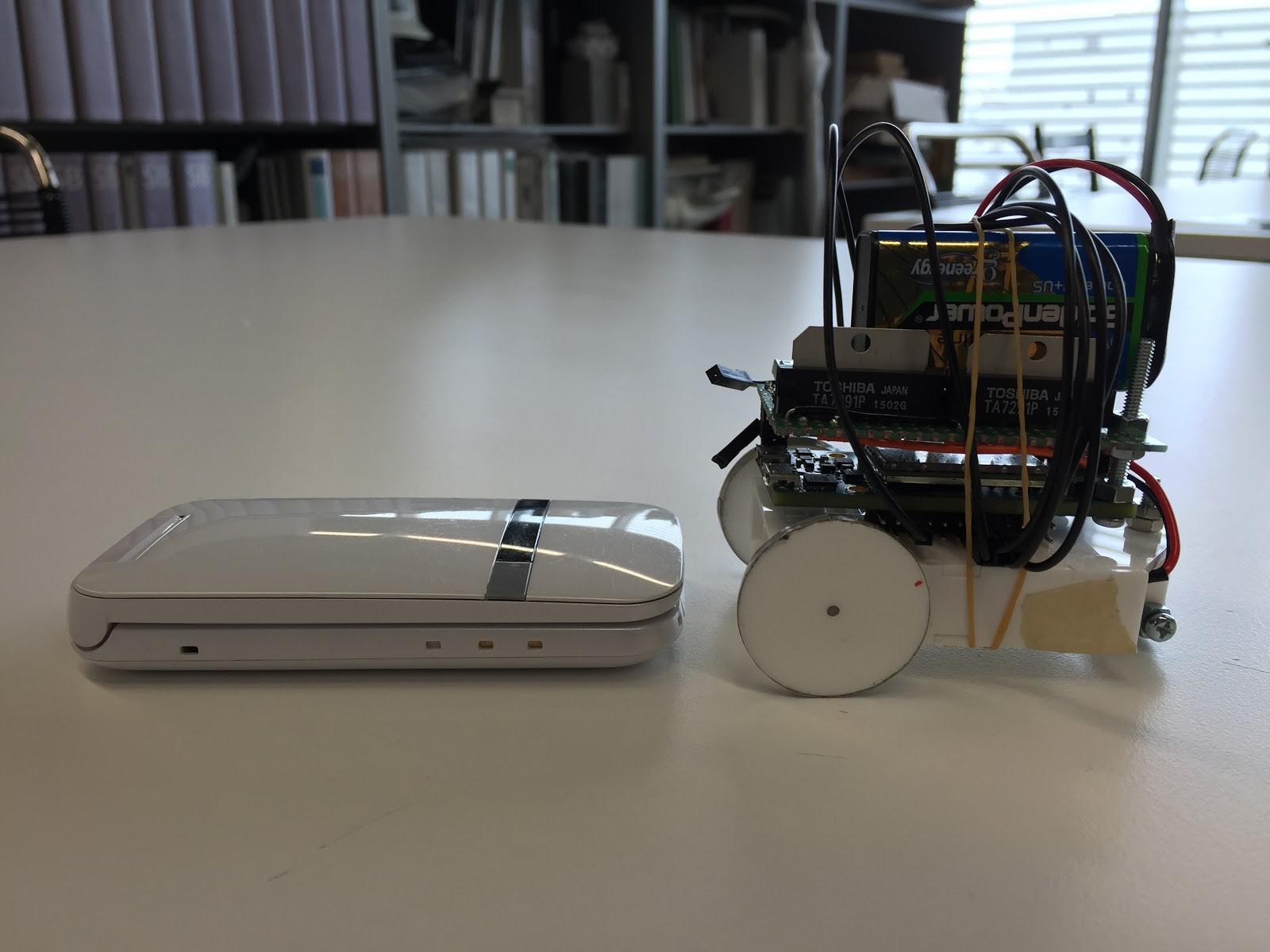
・ 1/20程度の建築模型の中を走ることができる小ささ(→1Mx2M程度のドア枠を想定し、幅50mm、高さ100mm程度)
・ カメラを首振り可能とする
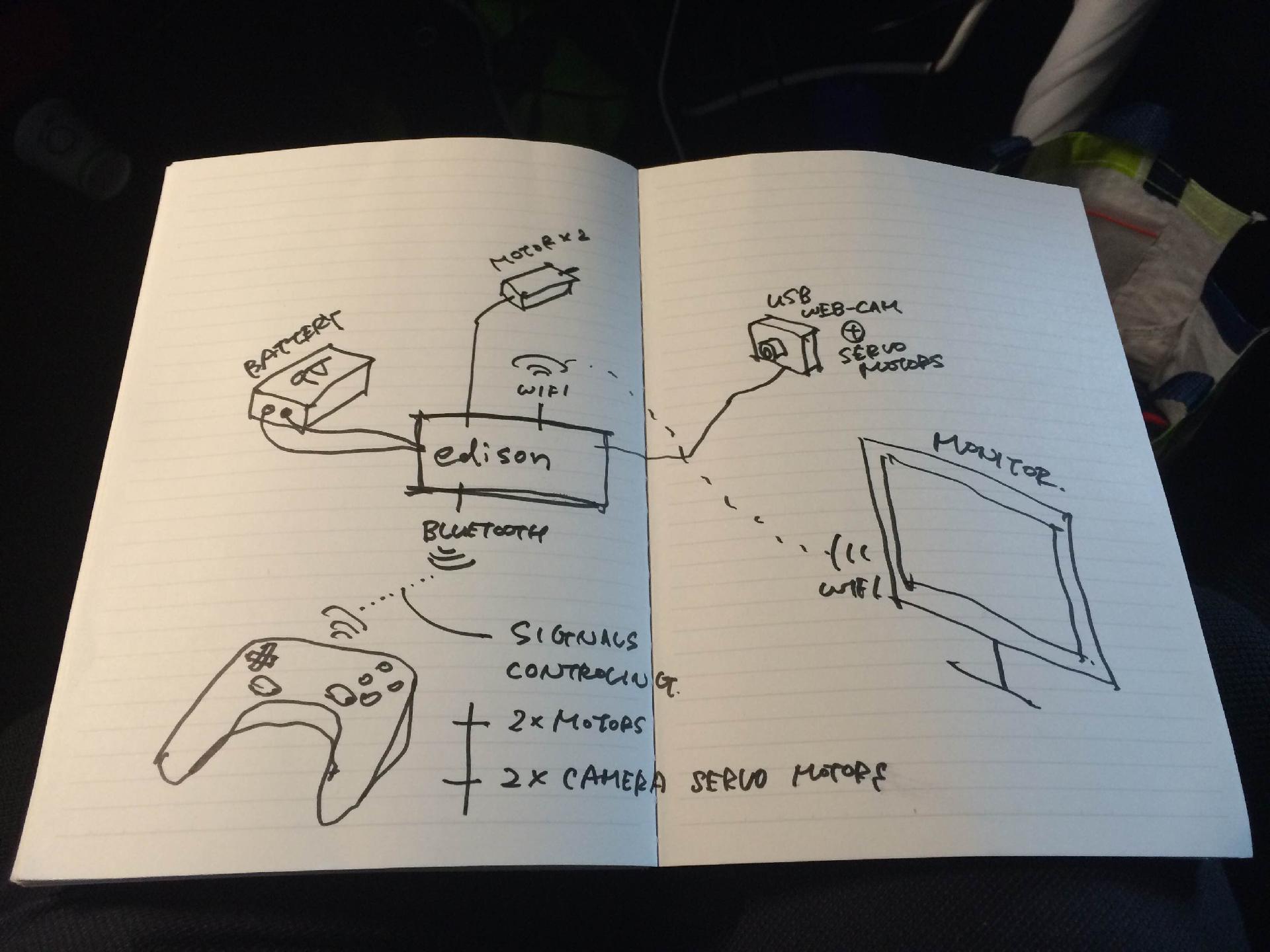
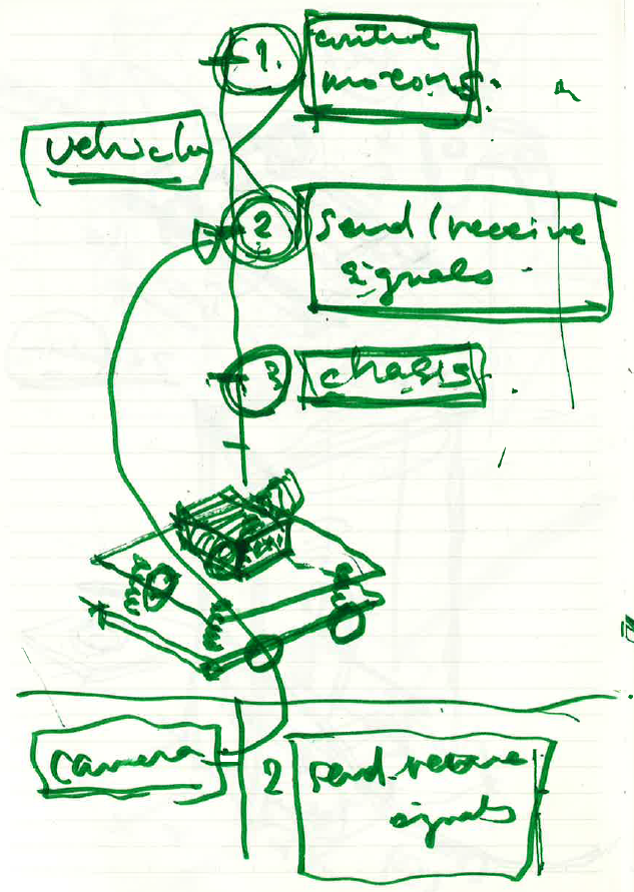
この与件を満たすために、下記のシステムを考えました。
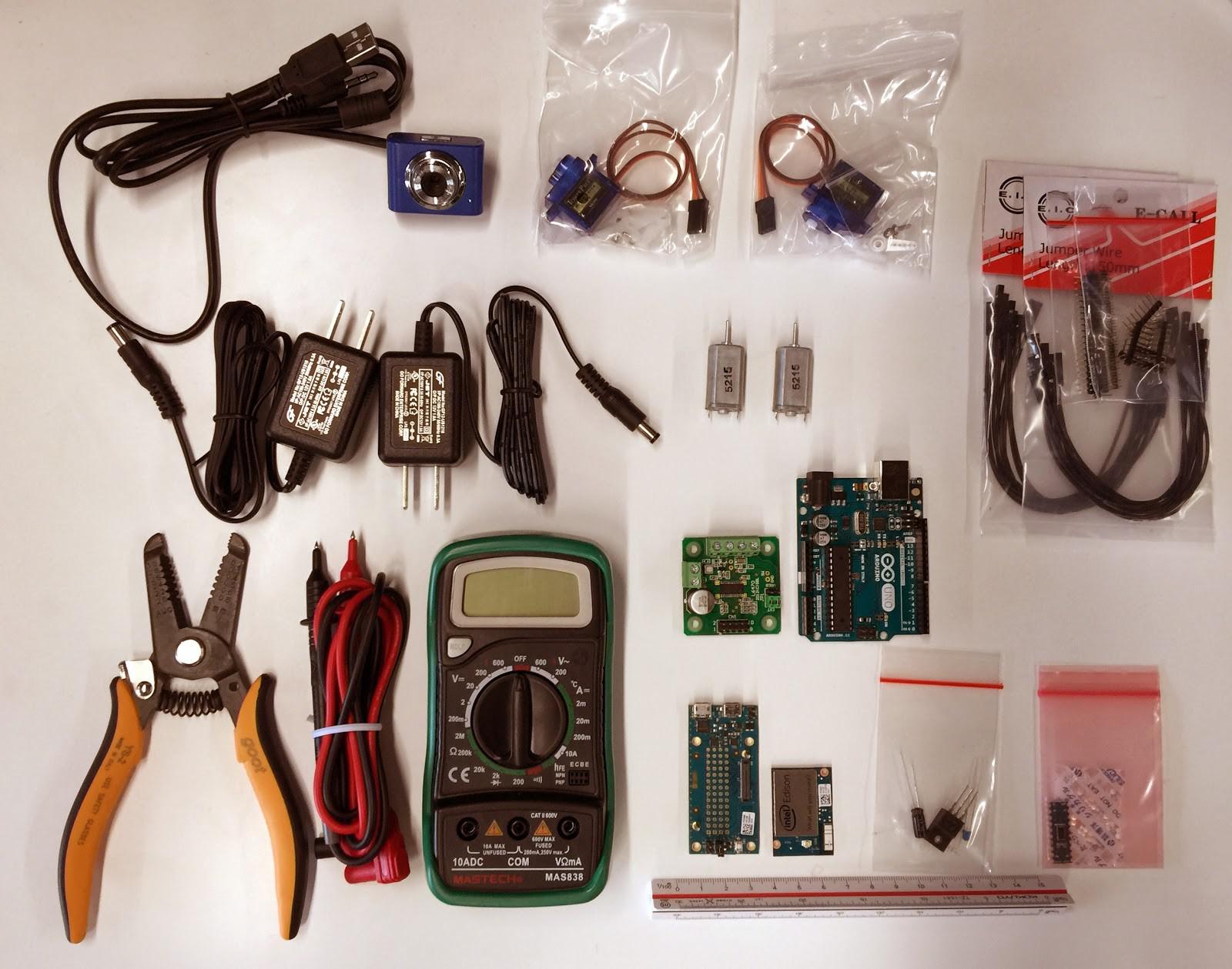
・ 市場で手に入るマイクロコントローラーで最も小さいと思われるIntel Edisonを搭載する。
・ EdisonのBluetooth機能を利用して手元のコントローラー(Playstation4のコントローラー)と通信する。
・ EdisonのWiFi機能を利用してカメラの画像をモニターへ送信する。
・ カメラの土台に2つのサーボモーターを取り付け、上下及び左右の首振り可能とする。
・ PS4のコントローラーからカメラのモーター、Vehicleのモーターを制御する。
次回からは各担当から1か月に1回ほど更新してもらう予定です。

コメントをするにはログインしてください。