In this post we will explain the developments of the mechanicals part of the current SuL Physical Computing project. The aim of this project is develop a small scale camera vehicle that we fit in a 1:20 scale model. For the introduction to this project, please refer to the first post in this series.
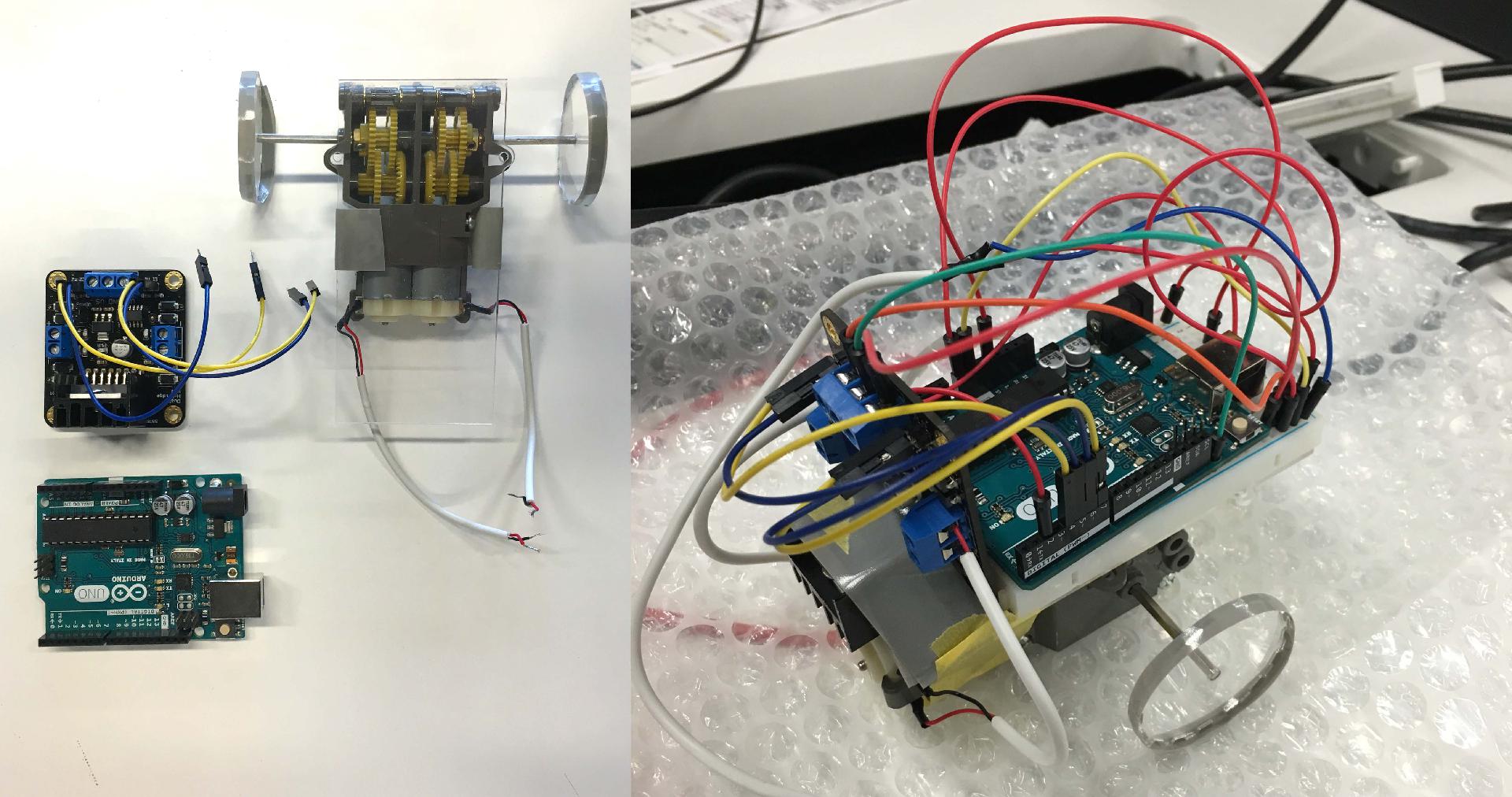
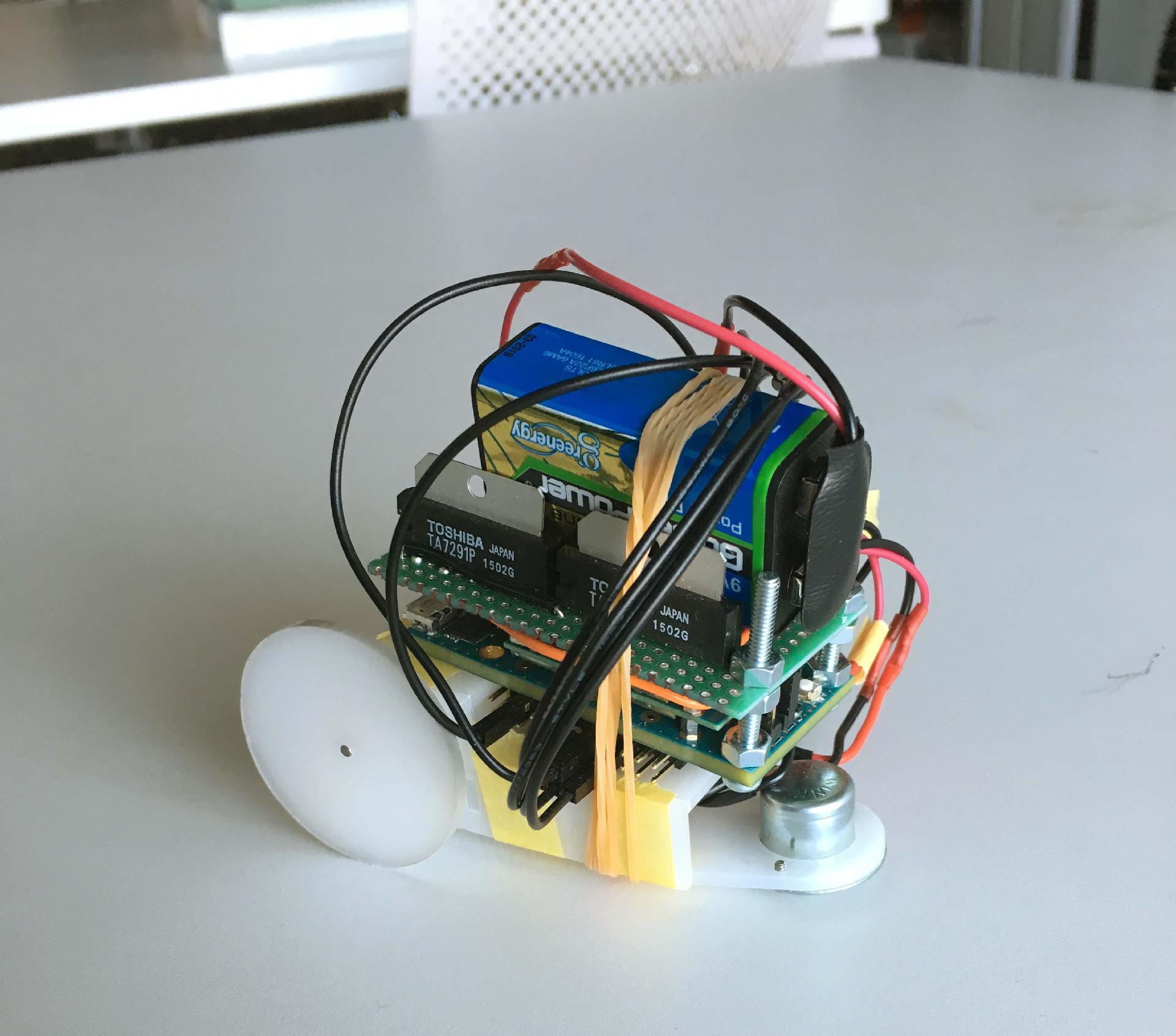
The approach to developing this vehicle is based principles of rapid prototyping, where we constantly test our ideas through fast and often crude prototypes. For the first test we used the Arduino UNO microcontroller, a L298N Dual-H Bridge DC Motor Driver and Tamiya Twin-Motor Gearbox. All of these are fairly simple products, which we connected with jumper wires and fixed together with tape.
We are aiming for total width of the final vehicle is less than 50mm, but since the Tamiya gearbox exceeds this we have to develop a smaller gearbox.
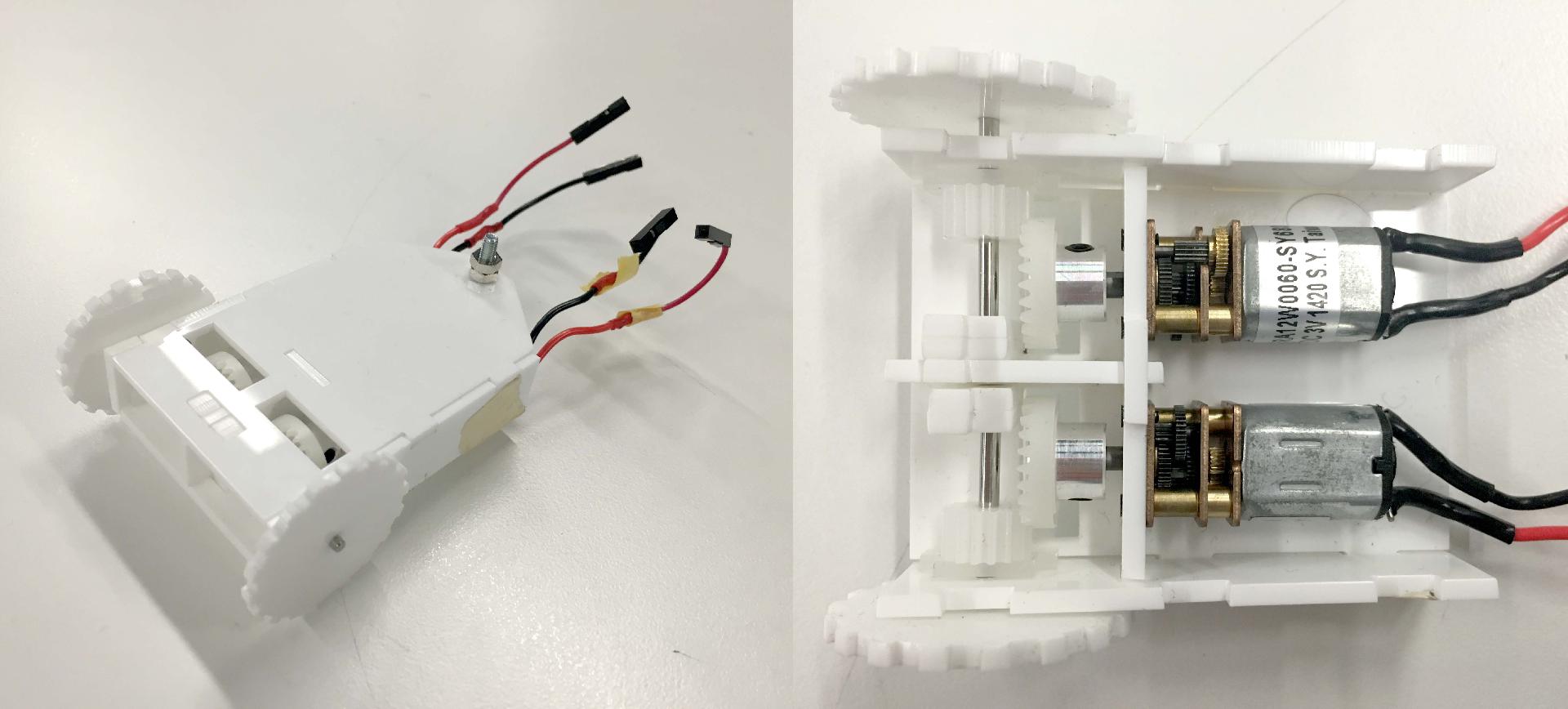
For the first version of the gearbox we used 2 x Geared Mini Motors from Daisen together with crown gears. With this setup, the speed of the wheels are somewhat fast, so it is difficult to precisely control the movement of the robot. The the with of this gearbox is close to 50 mm, which only gives us very limited amount of space the wheels.
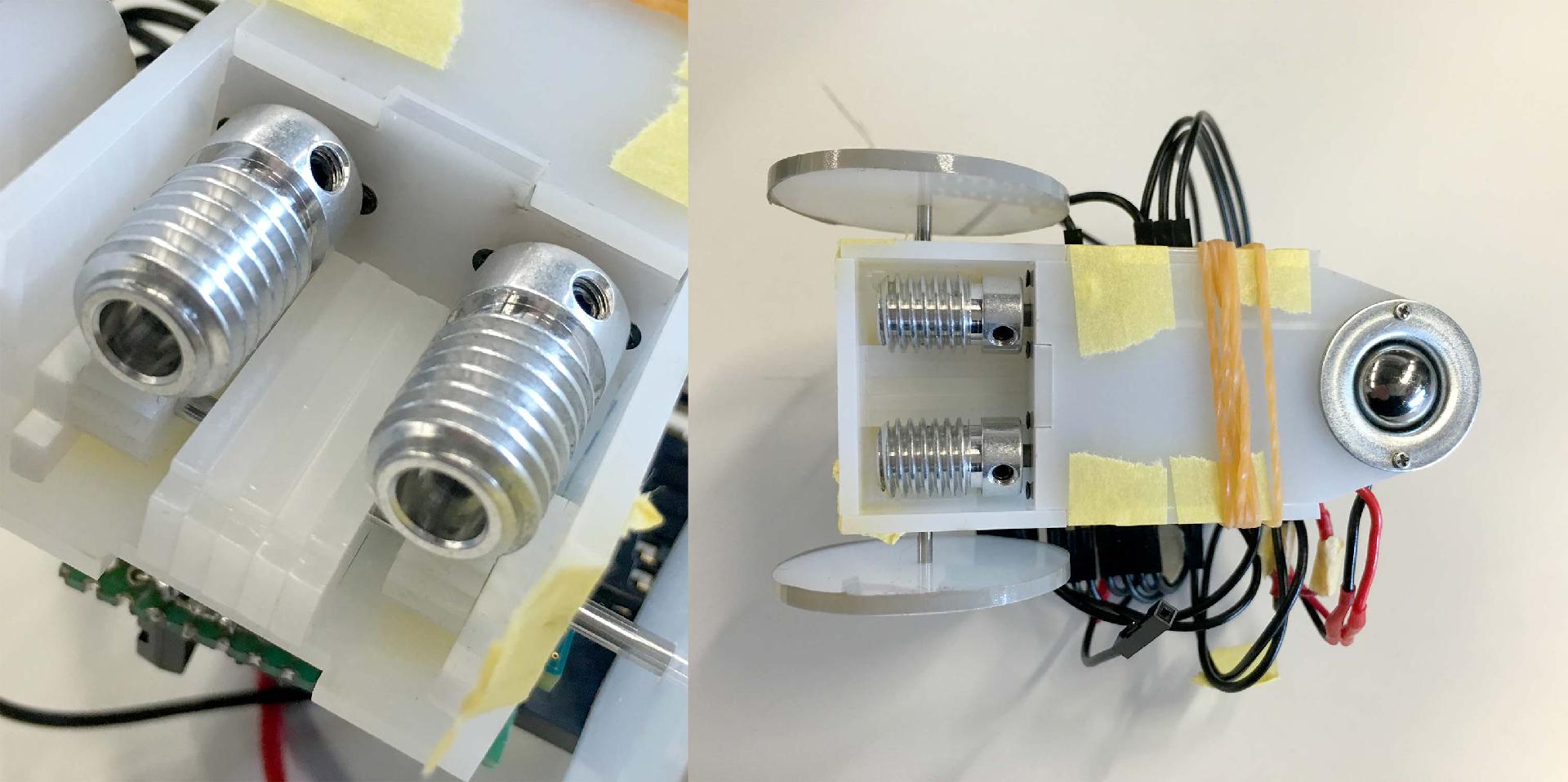
For the next iteration of the gearbox we replaced the crown gears with worm gears. By doing this the with raised the gear ratio, which slows the speed of the wheels. Futhermore, this change allowed us to make the gearbox 1 cm narrower by moving the shaft above the worm gears. A caster ball is used in the place of a front wheel.
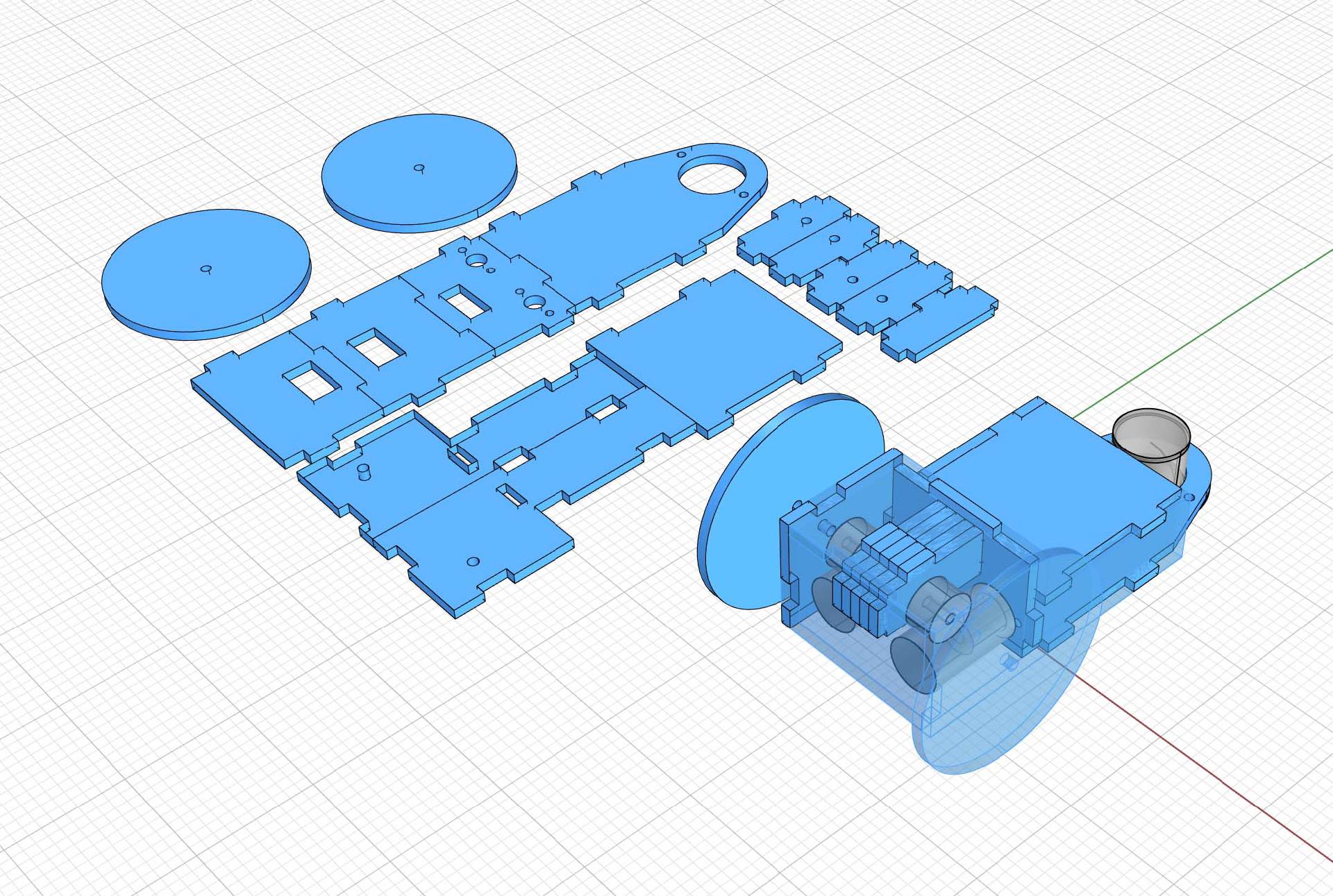
The prototypes of the vehicles are cut in 2mm sheets. On the image above the new placement of the shaft in relationship to the crown gears can be seen.
So far only little thought has been given to the wheels and the actual geometry of the chassis. We will return to these design element when we have experimented more with the electronics. In the next post we will take a closer look at the electronics.

コメントをするにはログインしてください。